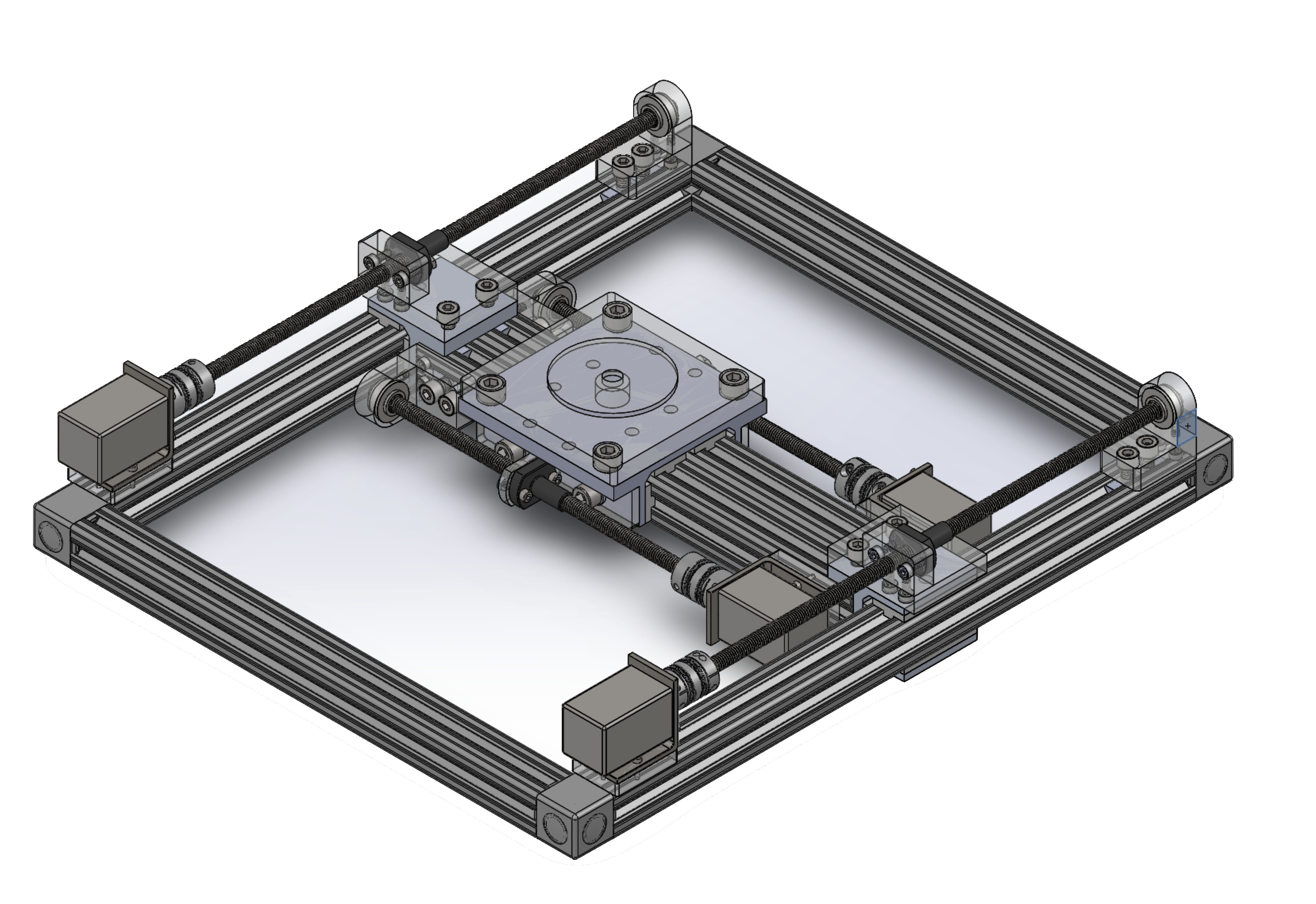
Xy is the next evolution of the Tom system, delivering travel along a two-dimensional path for camera strafing, zigzagging, and around-the-corner shots. Diving deeper into Xy's software development, other user features are available: programming a grid on which to call out camera positions, or "sketching" the cameras path in a browser for a more tangible UI experince.

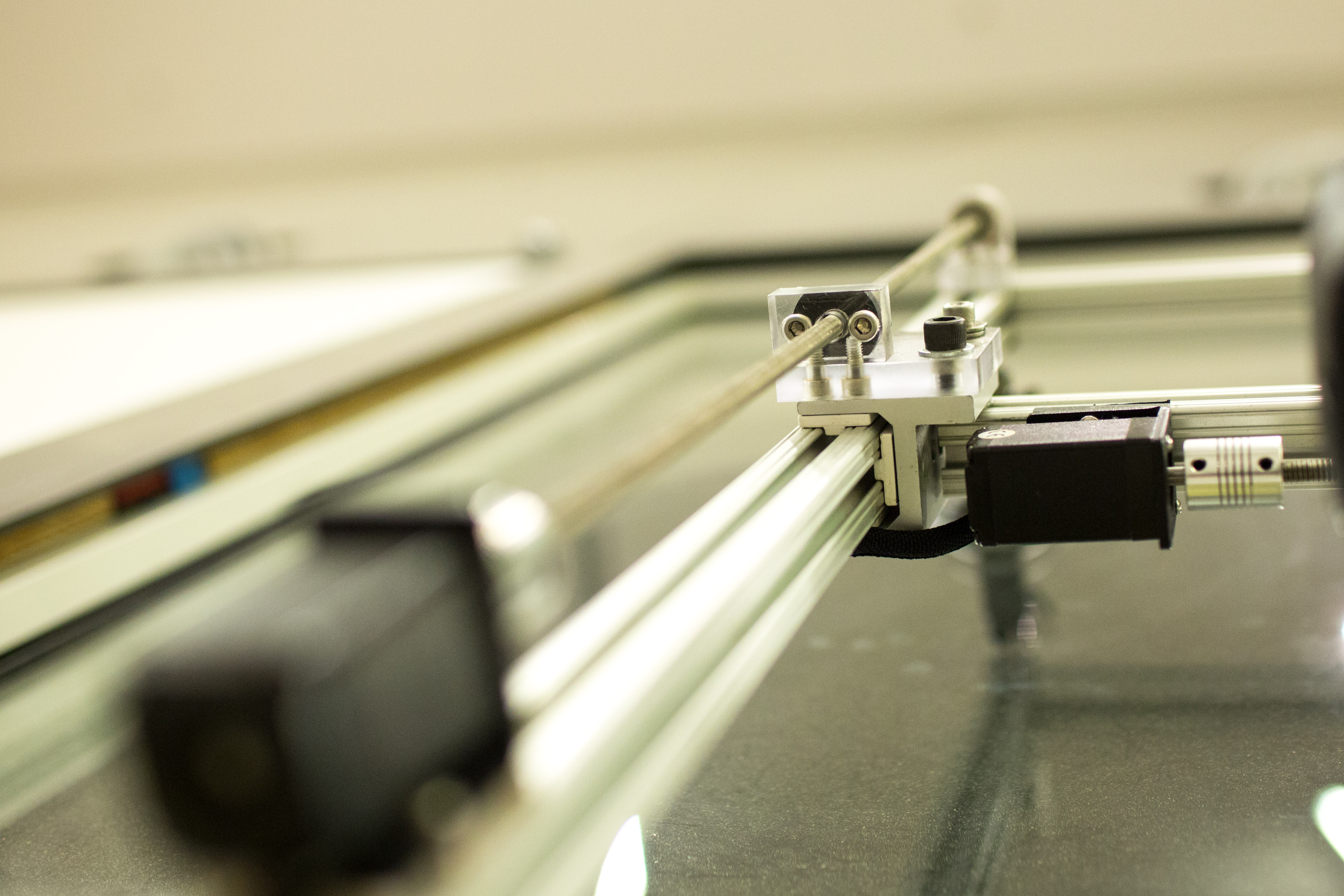
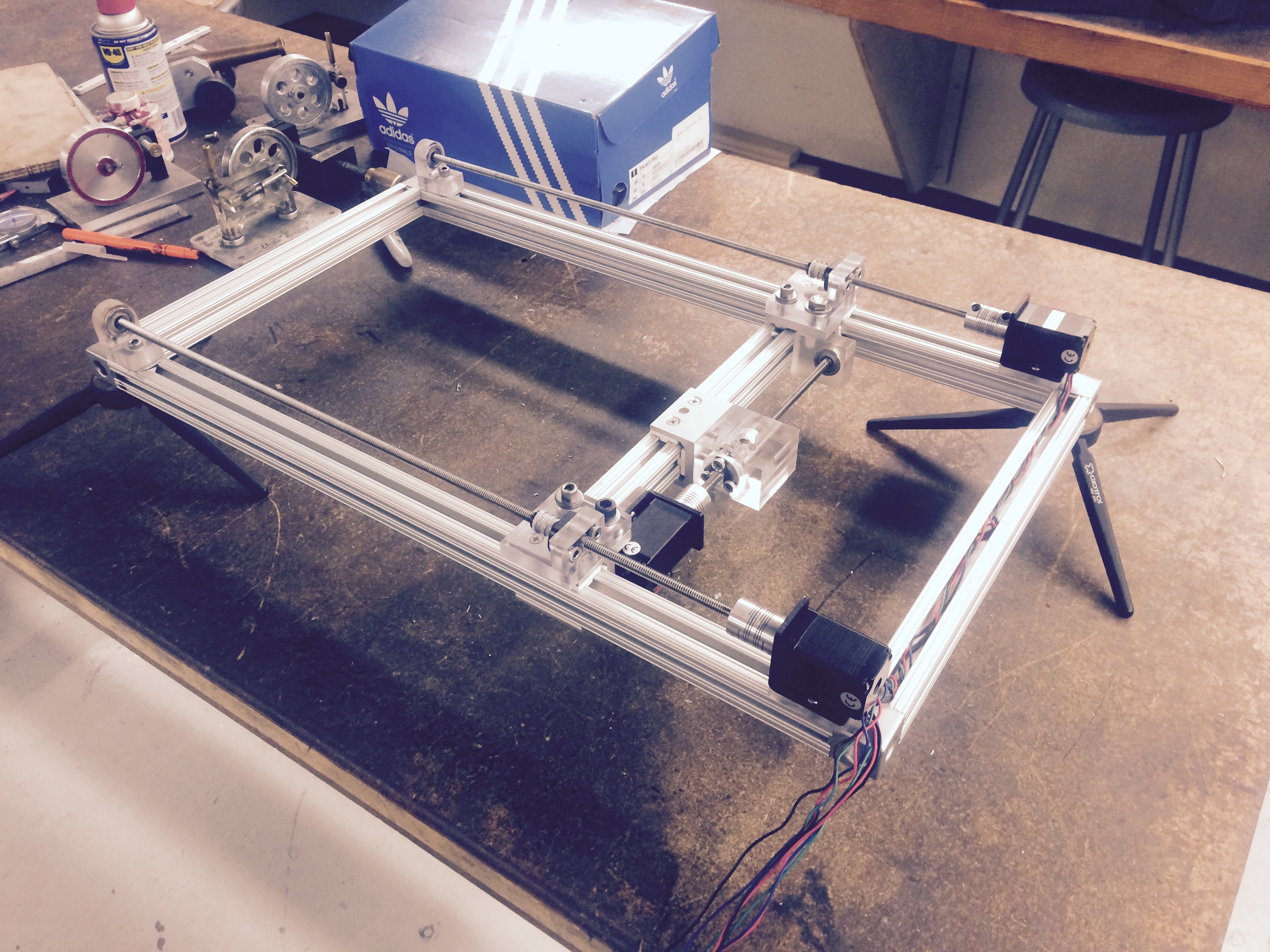
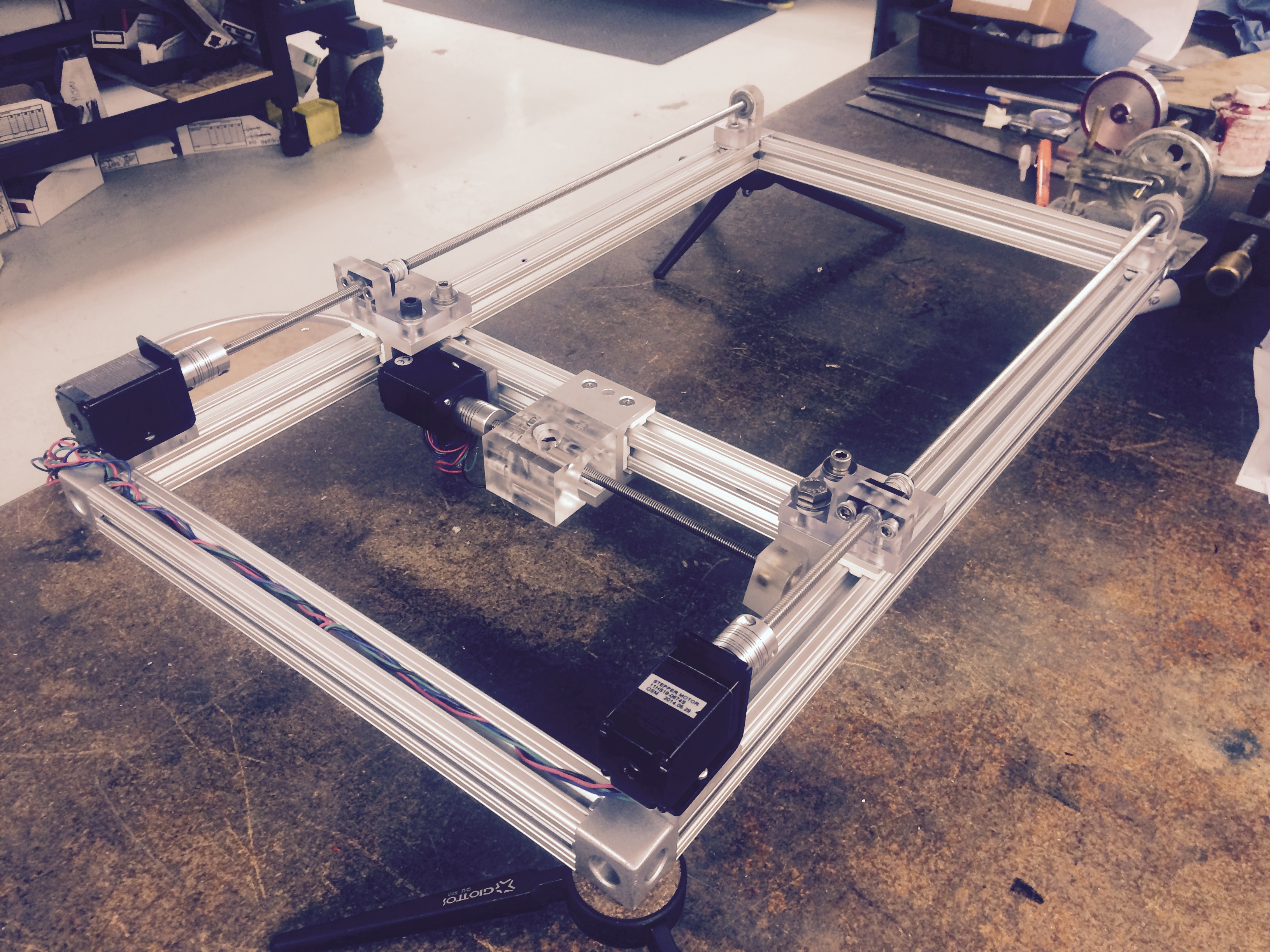
I wanted to make a more modular system than Tom, so I made Xy from standard aluminum extrusion framing. The system can be built to any length or width up to eight feet long. Its modularity also allows for it to be nested into a third "z" axis.
I also designed the rail to be low profile and lightweight, allowing for more mounting options and subsequently more unique filming opportunities. These cool 1/4"-20 suction cups have been great for placing it on glass. They're coming in handy for whiteboard sketch time lapses, too.
Adding more physical computing to the mix, I implemented node.js and Johnny Five motor libraries to control Xy from a web browser by way of arrow keypresses. Next stop, teledildonics?







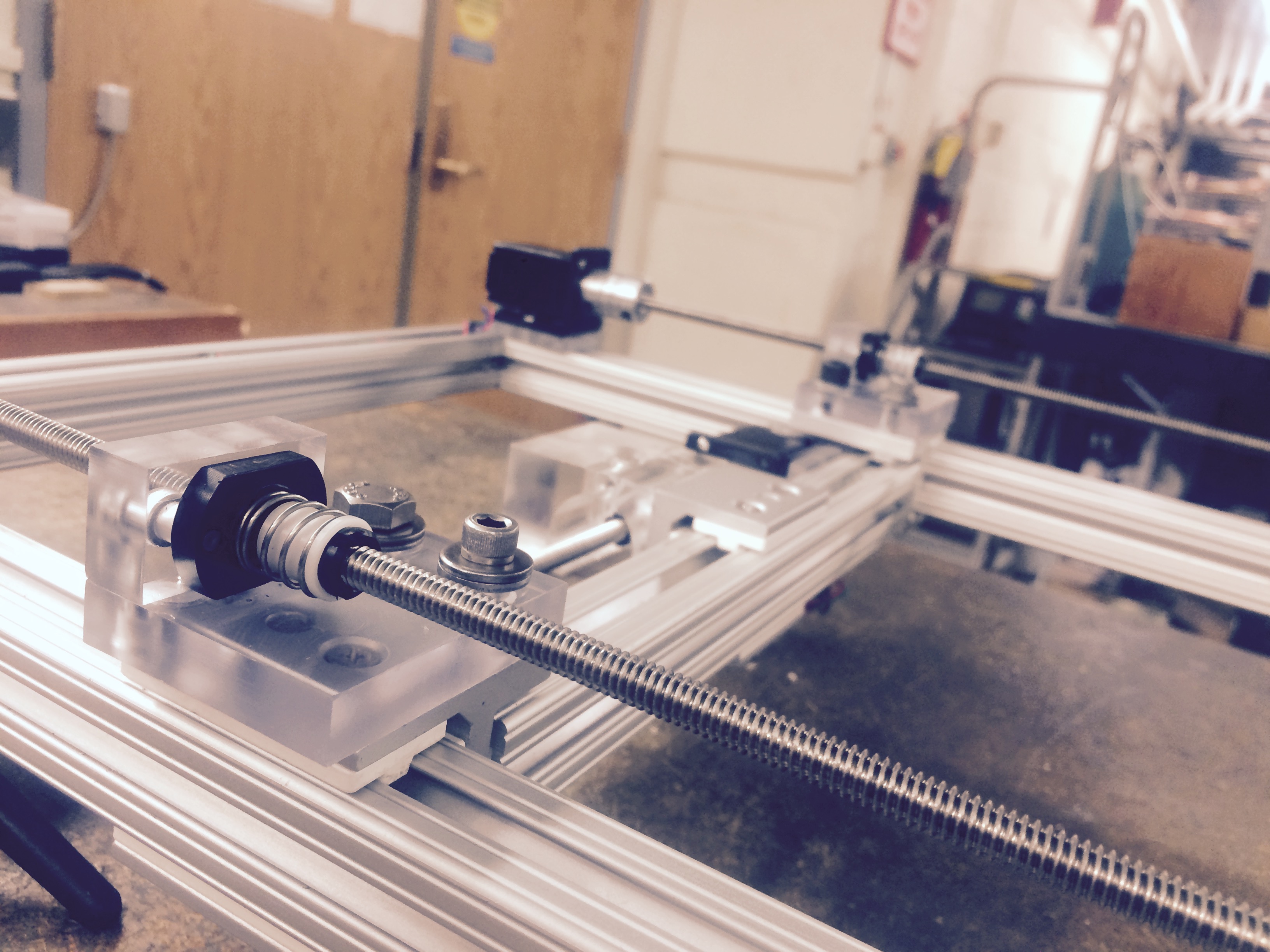
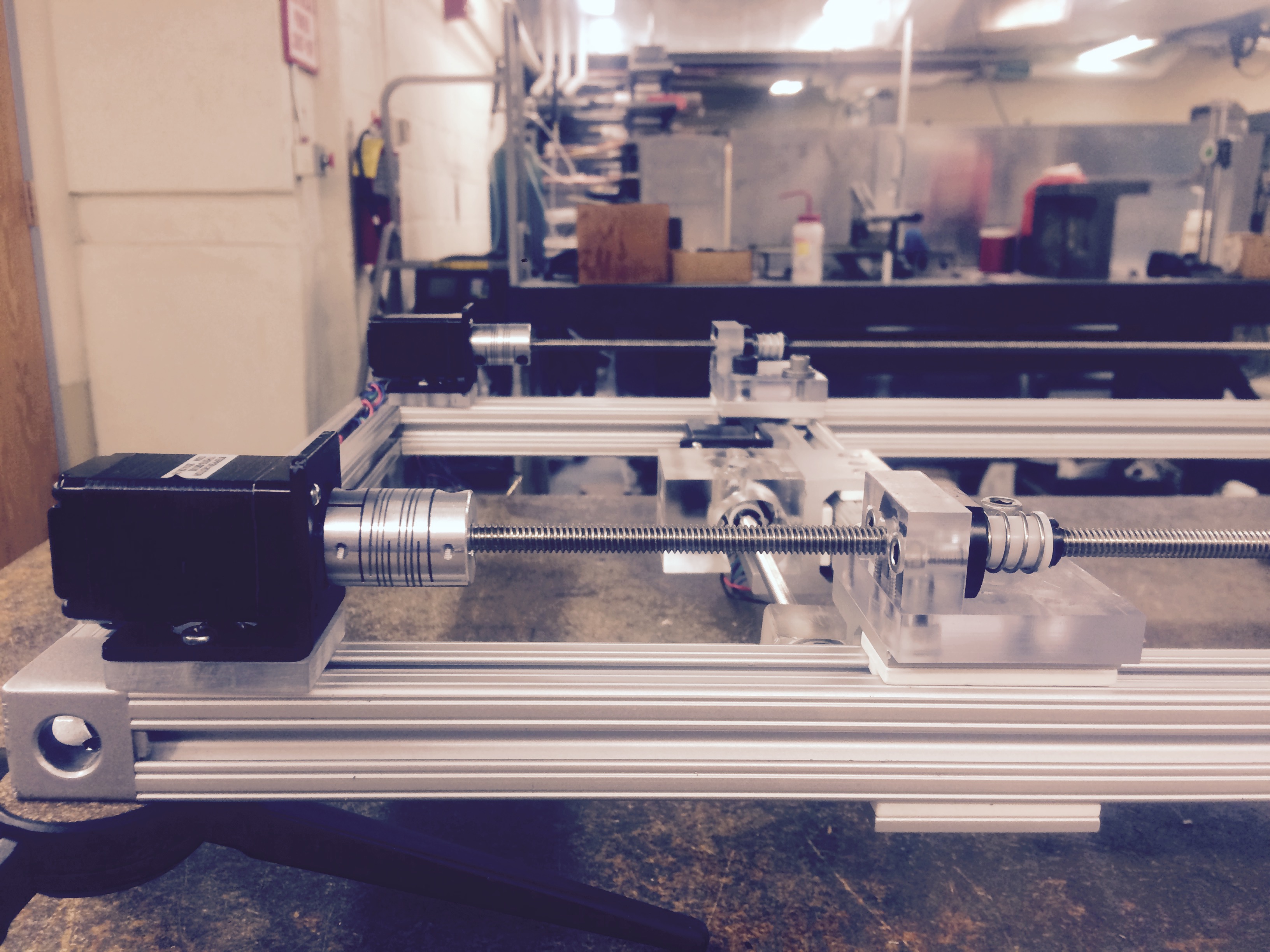
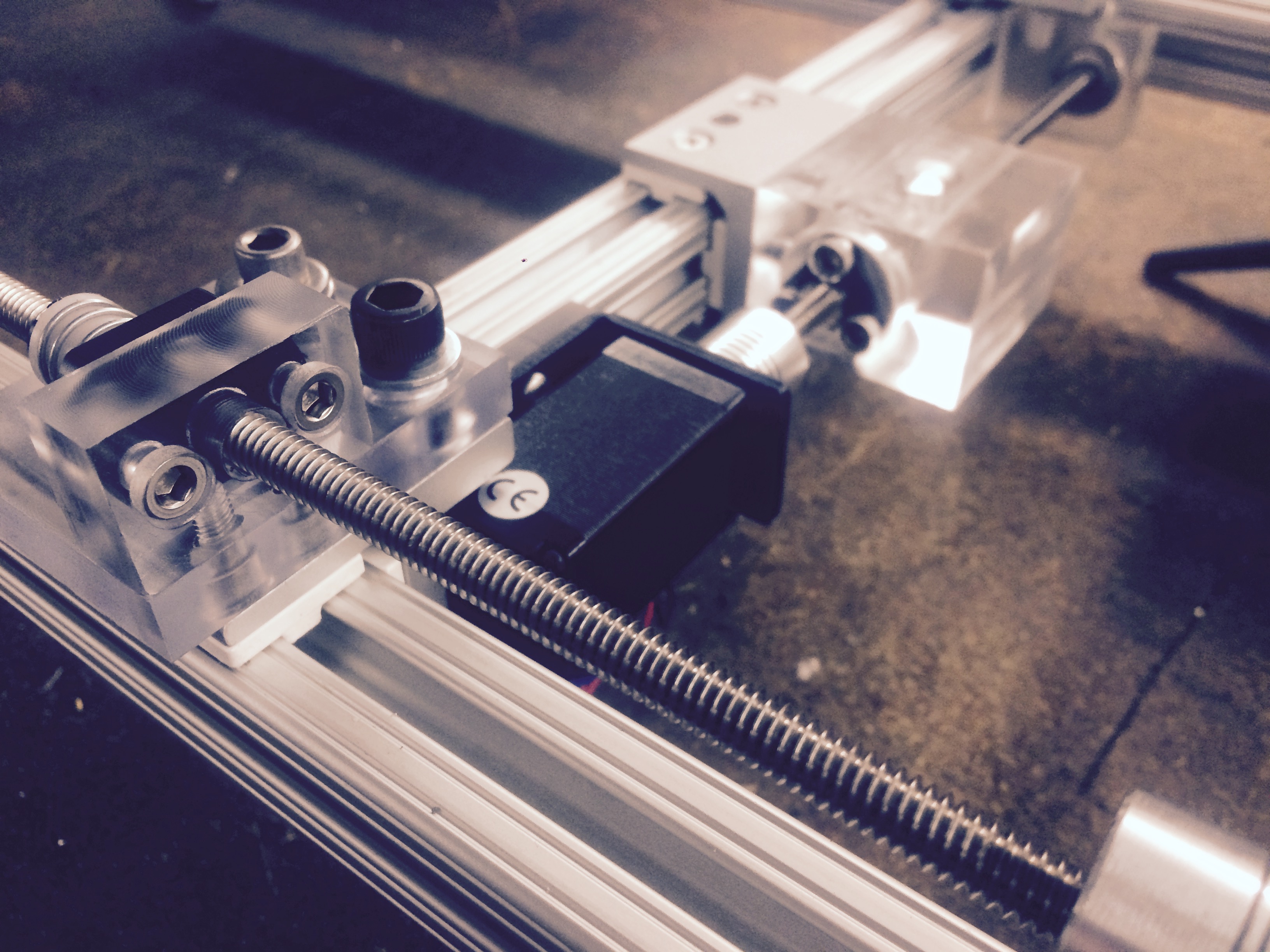

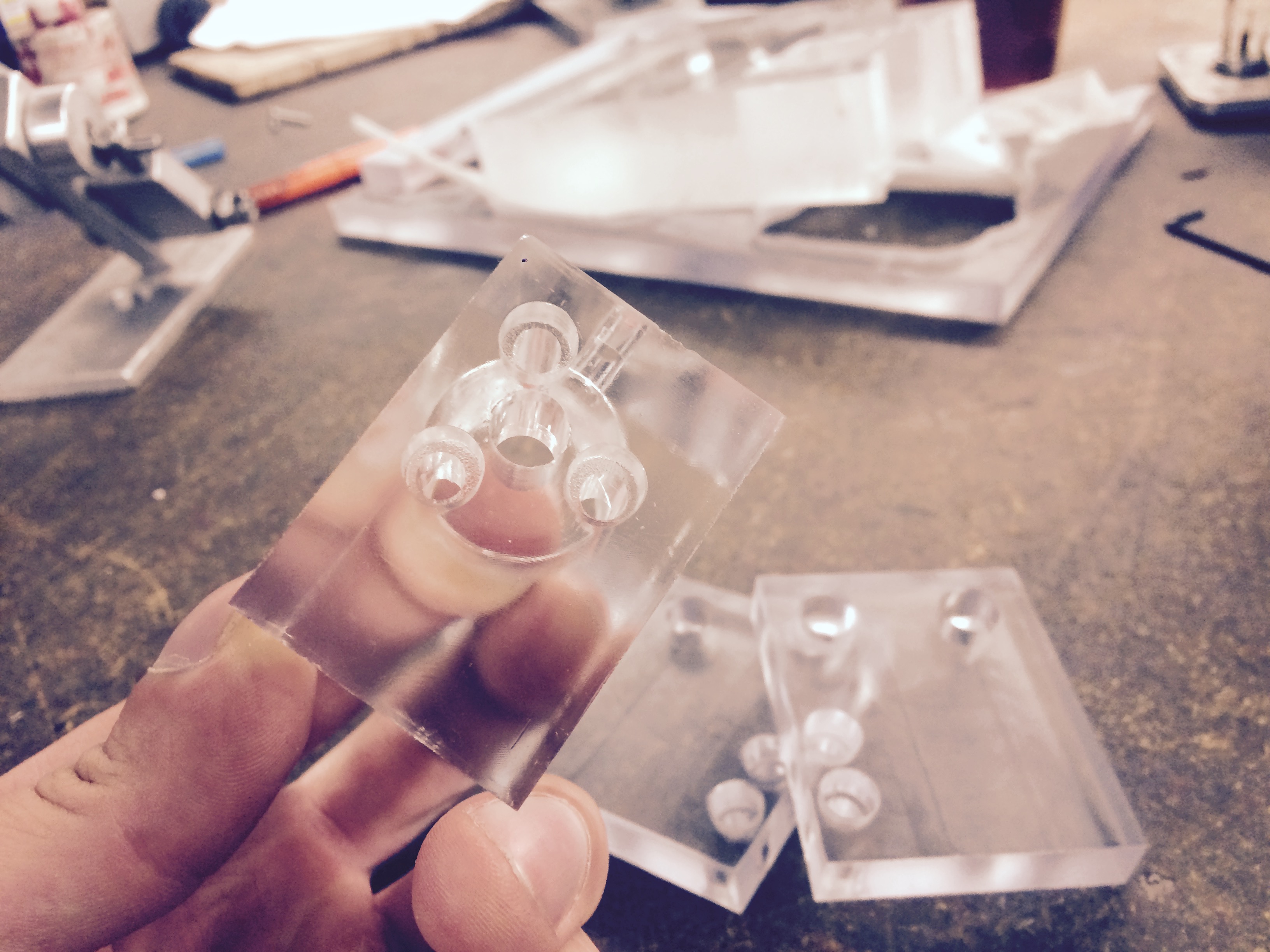
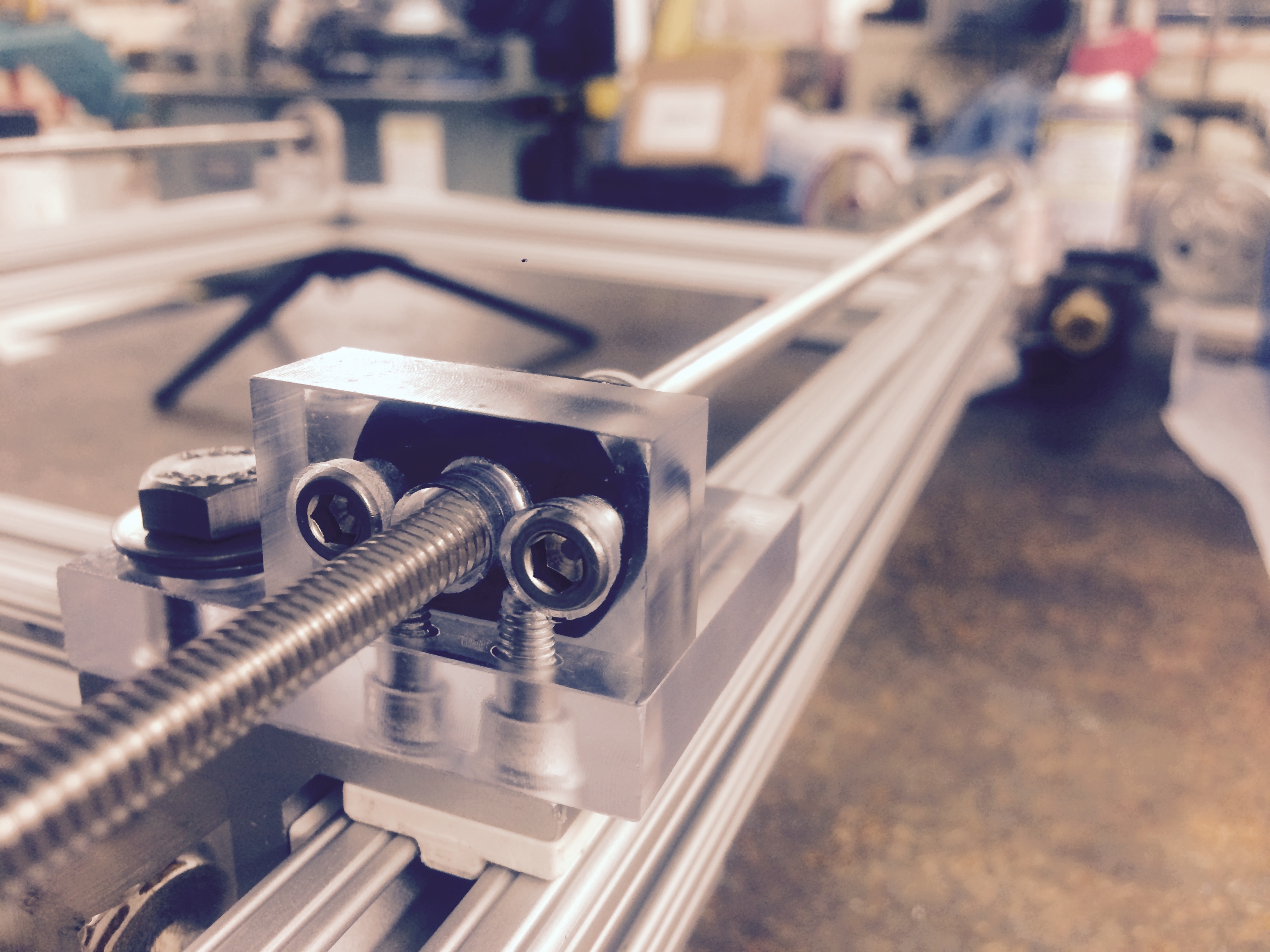
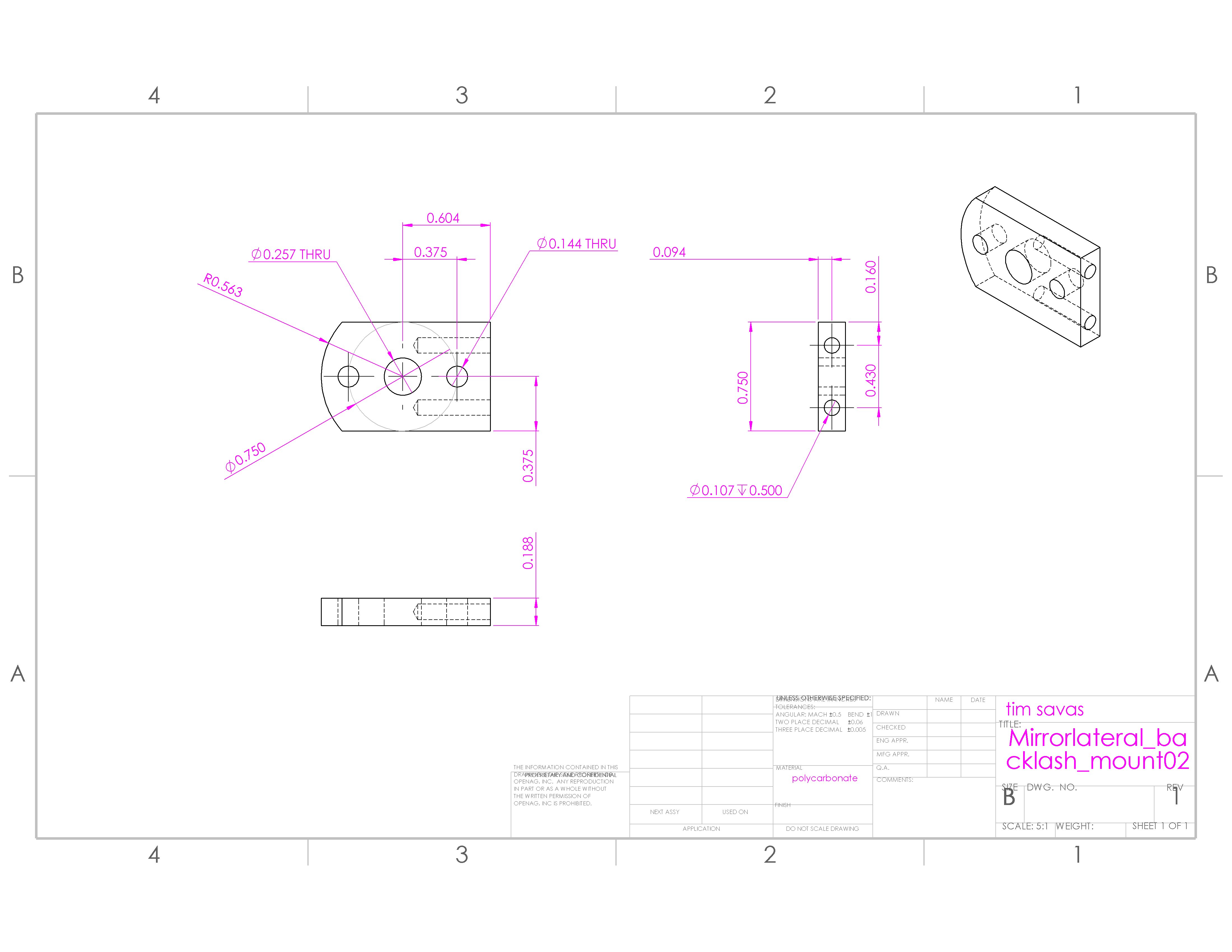
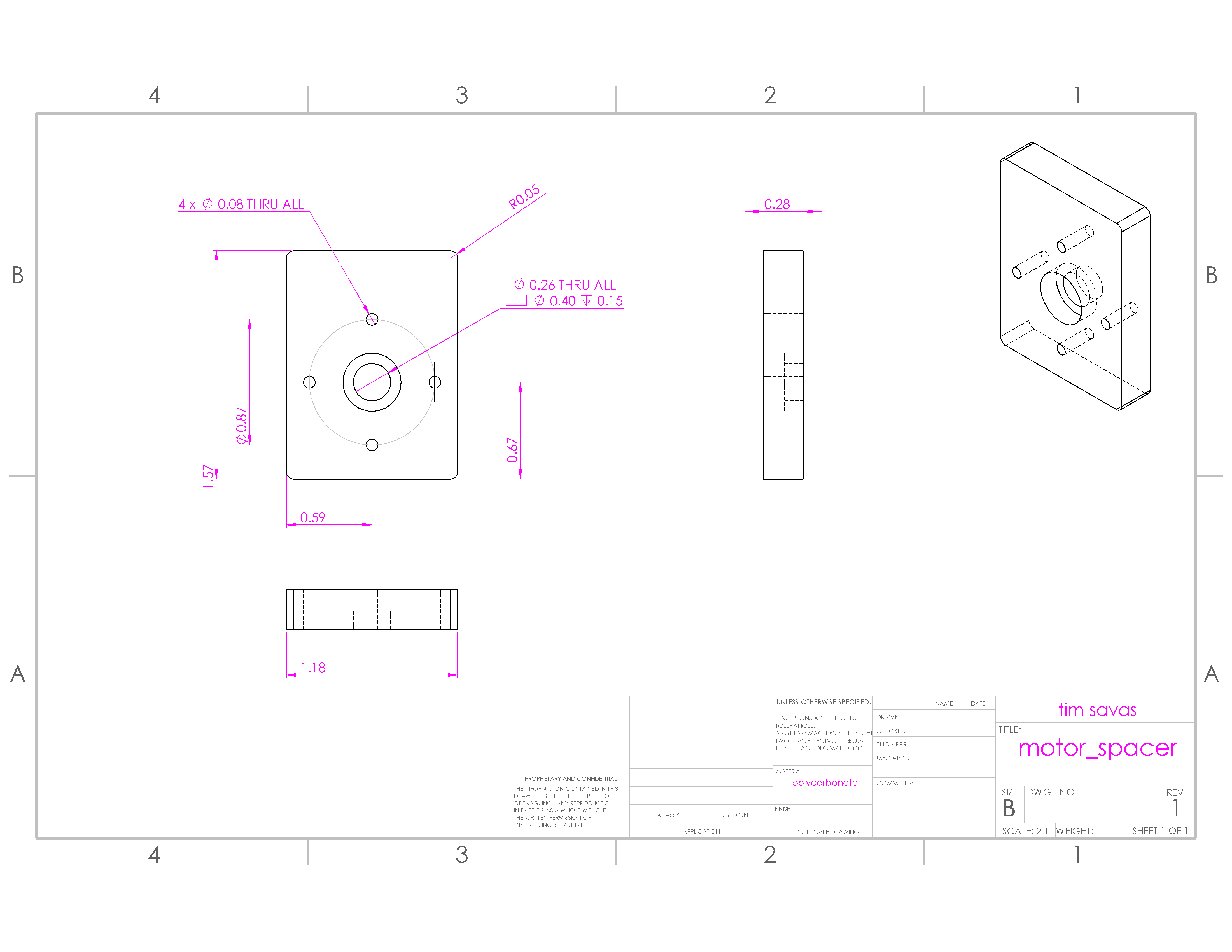
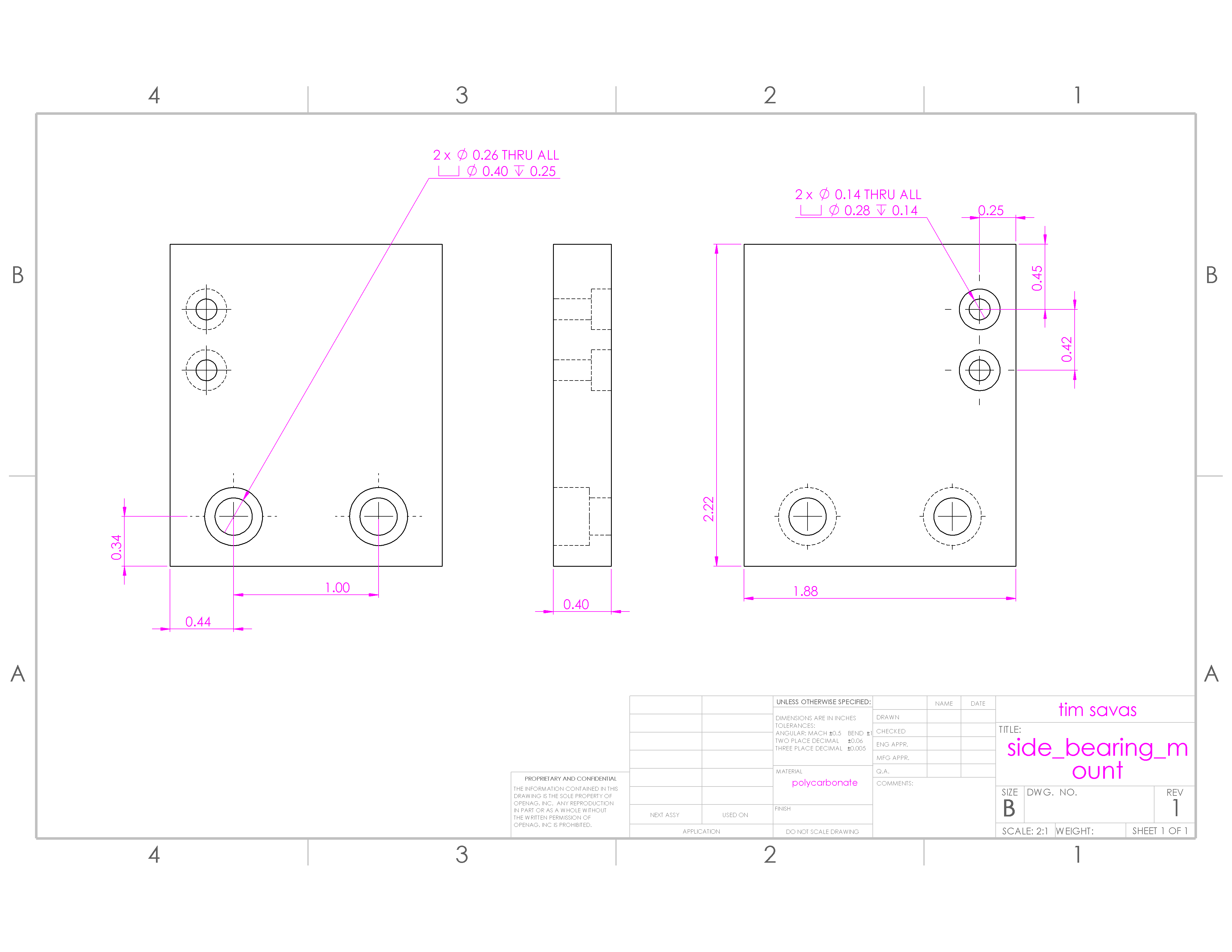
For its initial prototype, I manually milled all of Xy's polycarbonate parts on a Bridgeport [pats own back]. Friends with CNC machines and 3D printers were tied up that summer. Lucky for me though, I'm "nice with it." I used the project to learn to illustrate my own machinist drawings and how to implement them on pre-CNC tooling.
Xy is an open-source project. I know, I'm such a nice guy. Below is a complete bill of materials. All custom components can be milled from 1/2" thick material, or check out the STL folder to 3D print them. CAD models and drawings are to the right. The Github repo is the best place to start.
| SW Name | Code | Description | Q | QP | Cost/Unit | Cost | Serial | Supplier |
| 8020_corner | FRM | wide 8020 gantry | 4 | 4 | $6.83 | $27.32 | 47065T242 | McMaster Carr |
| 8020_wide | FRM | wide 8020 gantry | 1 | 1 | $12.85 | $12.85 | 47065T107 | McMaster Carr |
| S-006-025-NUT-SS | HRD | #6 nut | 4 | 1 | $3.83 | $3.83 | 90730A007 | McMaster Carr |
| M-025-005-SKT-SS | HRD | M2.5 5mm screw | 12 | 1 | $4.40 | $4.40 | 91292A009 | McMaster Carr |
| S-006-025-NUT-SS | HRD | #6 nut | 4 | 1 | $3.83 | $3.83 | 90730A007 | McMaster Carr |
| S-025-050-SKT-SS | HRD | 1/4-20 1/2" screw | 1 | 1 | $7.31 | $7.31 | 92196A537 | McMaster Carr |
| 8020_nut | HRD | library | 18 | 18 | $1.12 | $20.16 | 47065T226 | McMaster Carr |
| threaded_rod | HRD | 2' 1/4"-20 threaded rod | 4 | 4 | $4.35 | $17.40 | 93250A440 | McMaster Carr |
| S-516-050-SKT-H-SS | HRD | 1/2" 5/16 screw | 20 | 1 | $6.45 | $6.45 | 92196A578 | McMaster Carr |
| S-006-075-SKT-H-SS | HRD | #6 3/4" screw | 20 | 1 | $5.83 | $5.83 | 92196A151 | McMaster Carr |
| S-006-025-SKT-H-SS | HRD | #6 1/4" screw | 20 | 1 | $4.49 | $4.49 | 92196A144 | McMaster Carr |
| S-006-050-SKT-H-SS | HRD | #6 1/2" screw | 20 | 1 | $5.20 | $5.20 | 92196A148 | McMaster Carr |
| carriage_large | MOT | large 8020 bearing | 1 | 1 | $82.57 | $82.57 | 60585K38 | timsavas |
| flanged_bearing | MOT | flanged bearing | 4 | 4 | $7.21 | $28.84 | 6384K342 | McMaster Carr |
| backlash_nut_02 | MOT | backlash nut | 4 | 4 | $14.75 | $59.00 | AC14201-LN | DumpsterCNC |
| nema11 | MOT | Nema 11 stepper motor | 4 | 4 | $14.34 | $57.36 | 11HS18-0674S | Stepper Online |
| motor_bracket | MOT | Nema 11 motor bracket | 4 | 4 | $5.36 | $21.44 | 243 | Stepper Online |
| shaft_coupling | MOT | flex coupling for shafts | 4 | 4 | $43.51 | $174.04 | 2464K17 | McMaster Carr |
| stage | PLC | stage for camera | 2 | 1 | custom | custom | custom | timsavas |
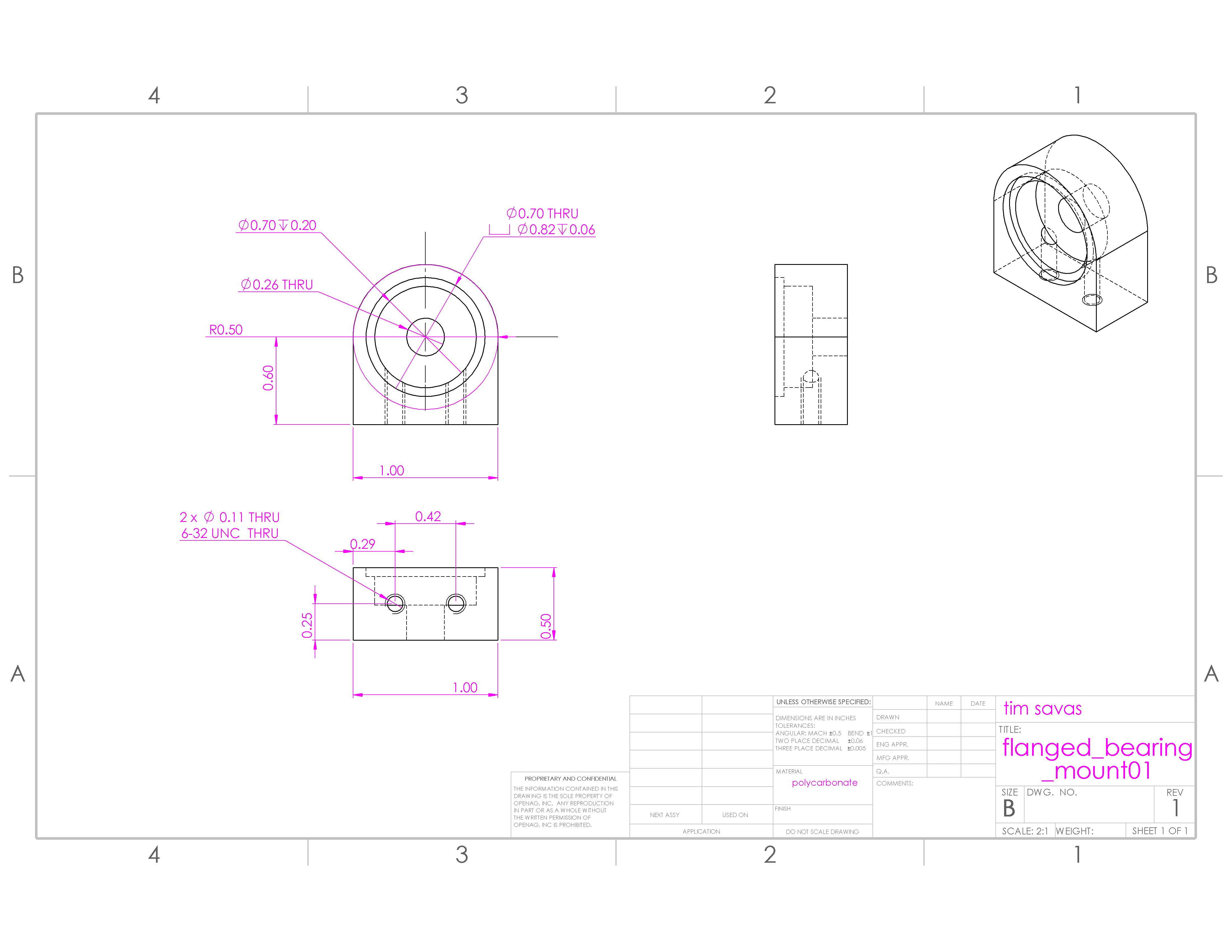
| flanged_bearing_mount01 | PLC | mount 01 for flanged bearing | 2 | 2 | custom | custom | custom | timsavas |
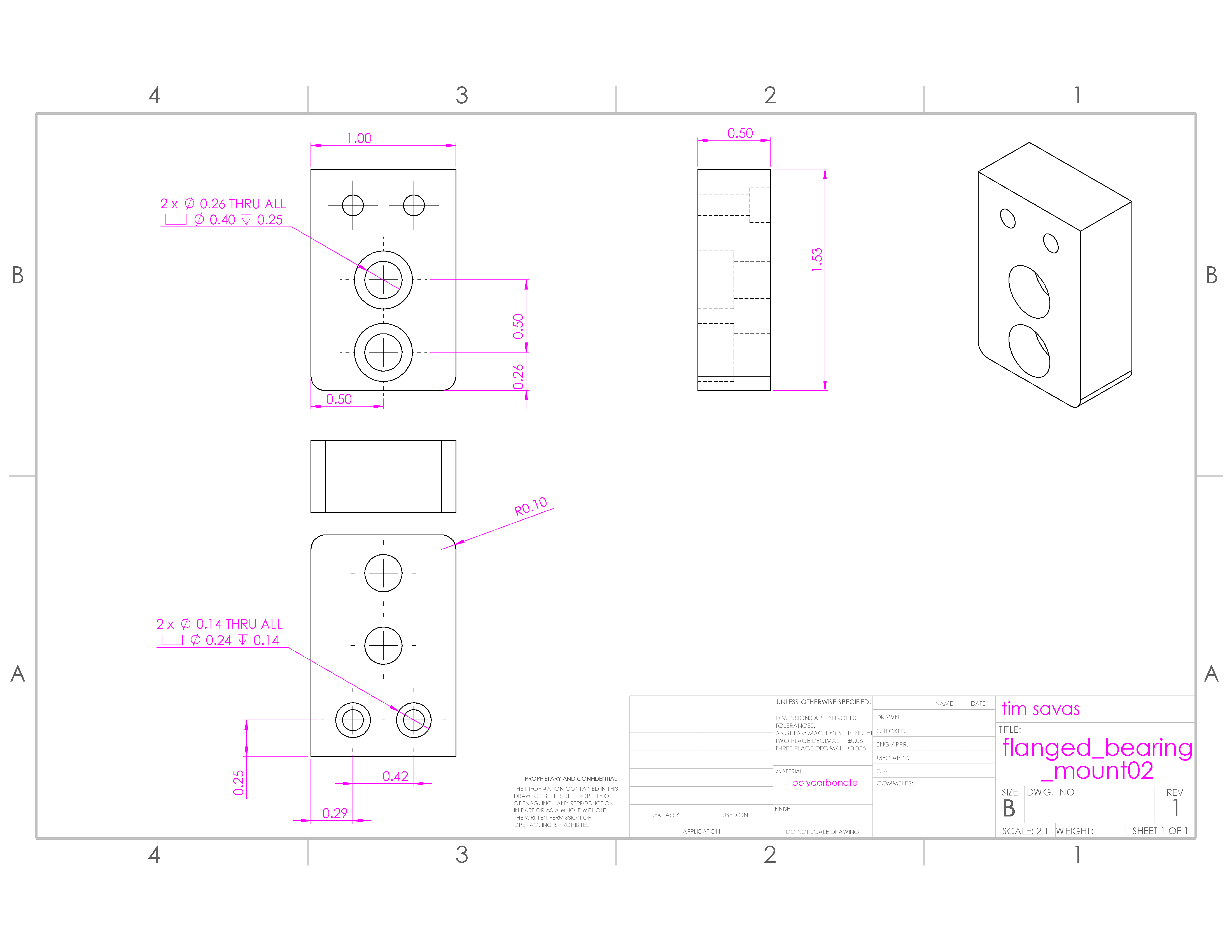
| flanged_bearing_mount02 | PLC | mount 02 for flanged bearing | 2 | 2 | custom | custom | custom | timsavas |
| lateral_backlash_mount02 | PLC | mount 02 for lateral backlash | 2 | 2 | custom | custom | custom | timsavas |
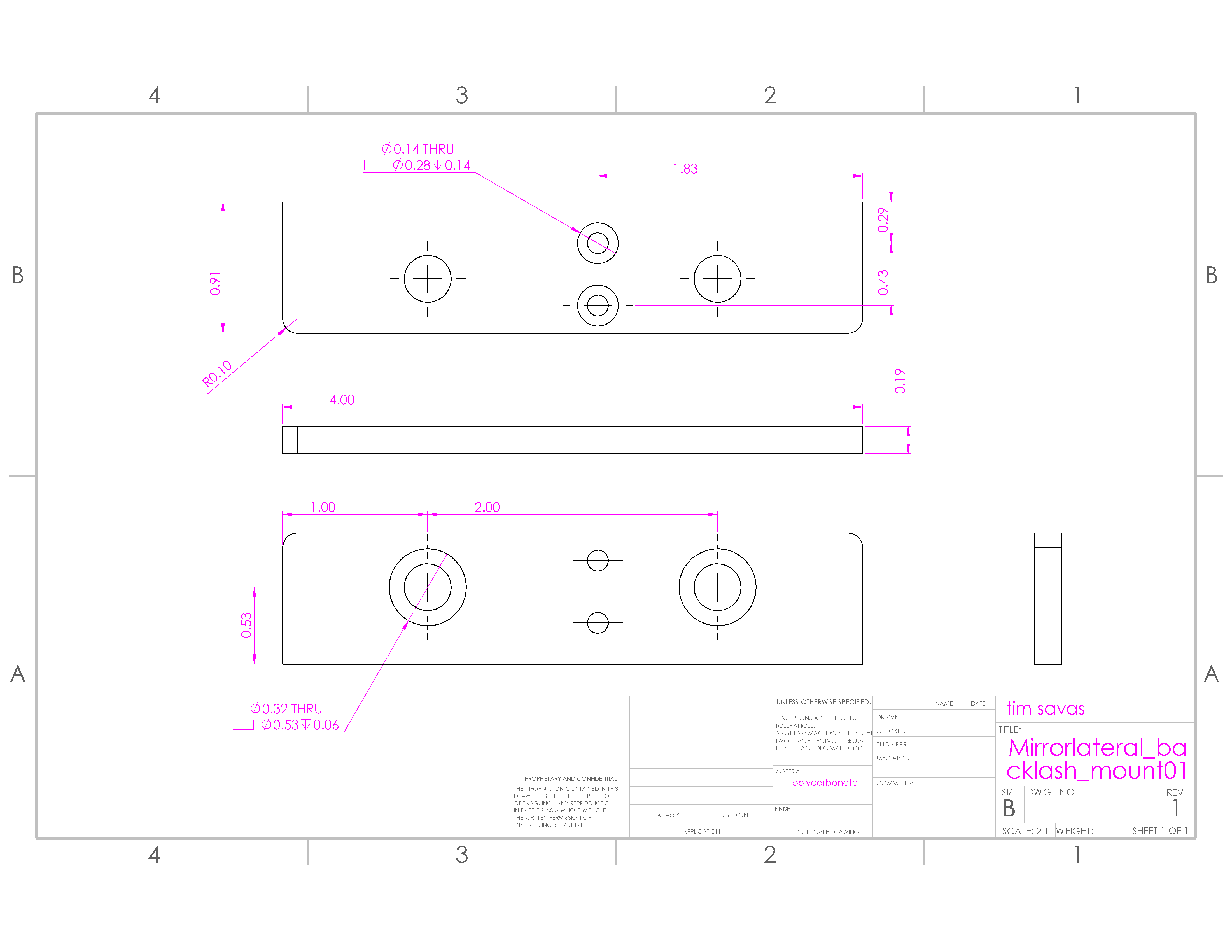
| lateral_backlash_mount01 | PLC | mount 01 for lateral backlash | 2 | 2 | custom | custom | custom | timsavas |
| motor_spacer | PLC | spacer for mounting motor | 4 | 4 | custom | custom | custom | timsavas |
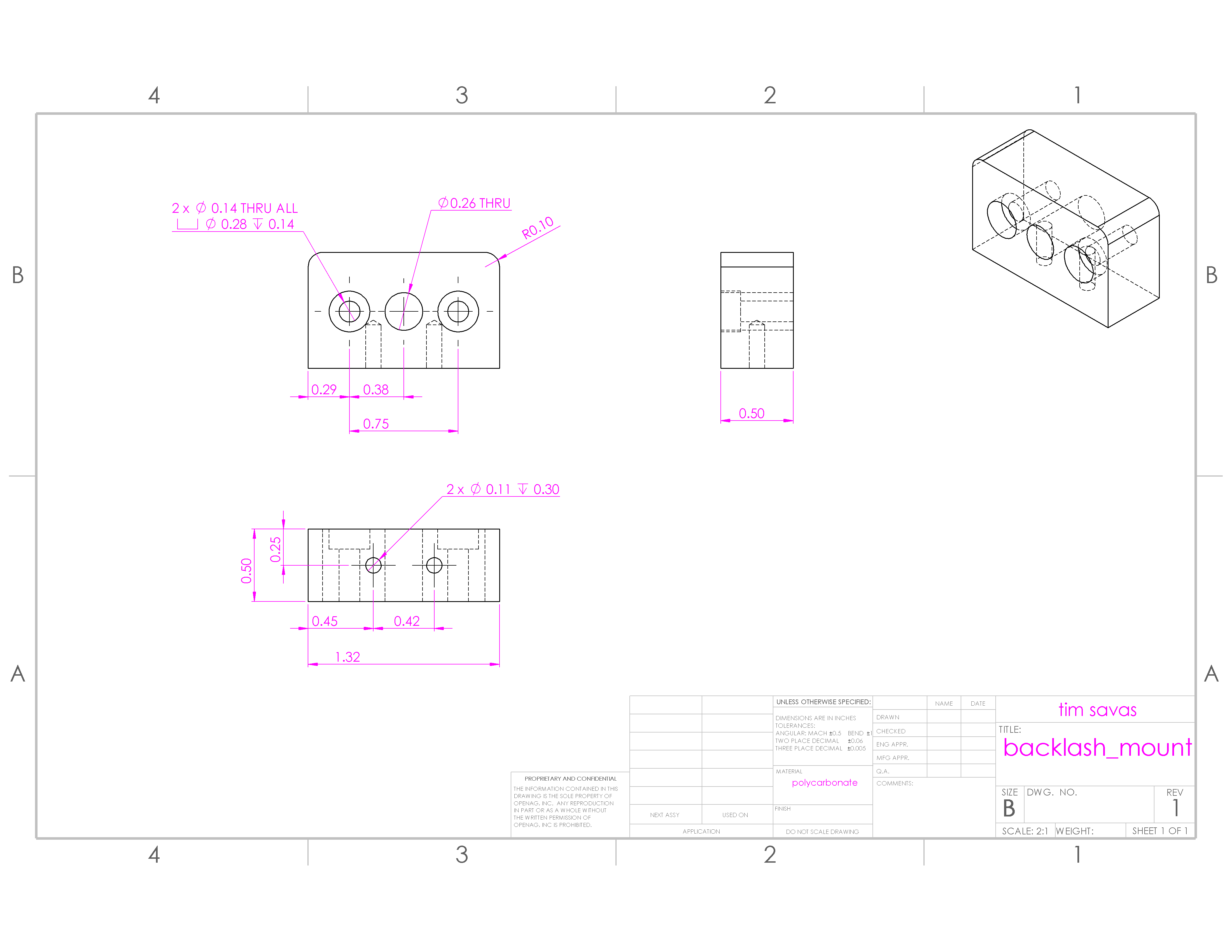
| backlash_mount | PLC | mount 01 for vertical backlash | 2 | 2 | custom | custom | custom | timsavas |
| side_bearing_mount | PLC | plastic bearing mount | 2 | 2 | custom | custom | custom | timsavas |